QR分解回顾
前一阵总结了一下常用的QR分解的方法,这里做一记录。
Gram-Schmidt正交化
基本思想
Gram-Schmidt正交化
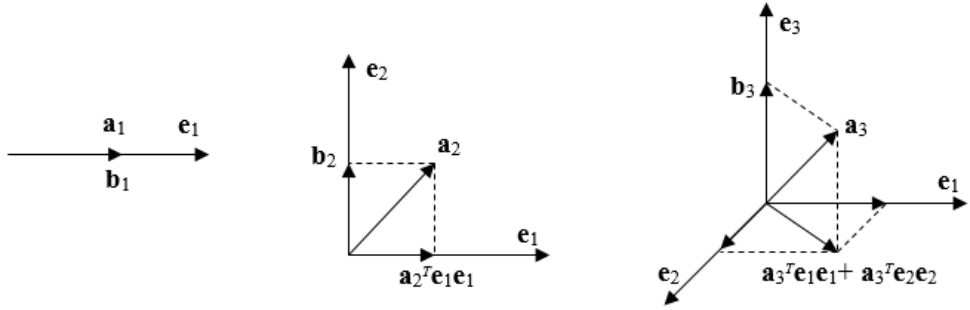
给定线性无关组$\alpha_1,\alpha_2,\cdots,\alpha_n$,构造单位正交基$q_1,q_2,\cdots,q_n$,使得$\text{span}(\alpha_1,\alpha_2,\cdots,\alpha_n)=\text{span}(q_1,q_2,\cdots,q_n)$。
采用的基本方法是投影法,即从$\alpha_1,\alpha_2,\cdots,\alpha_n$中依次减去其在$\text{span}(q_1,q_2,\cdots,q_{i-1})$上的投影,得到$q_i$。
$\alpha$在$\beta$上的投影是:$\frac{\alpha^T\beta}{\beta^T\beta}\beta$。
CGS算法
给定线性无关组$\alpha_1,\alpha_2,\cdots,\alpha_n$。
\[\begin{aligned} \widetilde{q_1} & = \alpha_1 \\ \widetilde{q_2} & = \alpha_2-\frac{\alpha_2^T\widetilde{q_1}}{\widetilde{q_1}^T\widetilde{q_1}}\widetilde{q_1} \\ \widetilde{q_3} & = \alpha_3-\frac{\alpha_3^T\widetilde{q_1}}{\widetilde{q_1}^T\widetilde{q_1}}\widetilde{q_1}-\frac{\alpha_3^T\widetilde{q_2}}{\widetilde{q_2}^T\widetilde{q_2}}\widetilde{q_2} \\ & \cdots \\ \widetilde{q_n} & = \alpha_n-\frac{\alpha_n^T\widetilde{q_1}}{\widetilde{q_1}^T\widetilde{q_1}}\widetilde{q_1}-\frac{\alpha_n^T\widetilde{q_2}}{\widetilde{q_2}^T\widetilde{q_2}}\widetilde{q_2}-\cdots-\frac{\alpha_n^T\widetilde{q_{n-1}}}{\widetilde{q_{n-1}}^T\widetilde{q_{n-1}}}\widetilde{q_{n-1}} \end{aligned}\]得到的$\widetilde{q_1},\widetilde{q_2},\cdots,\widetilde{q_n}$是一组正交基。之后把每个向量单位化:$q_i=\frac{\widetilde{q_i}}{|\widetilde{q_i}|}$即可。
Classic Gram–Schmidt Orthogonalization算法 CGS
我们可以把上面的式子写成矩阵形式,对于可逆矩阵$A=\begin{bmatrix} \alpha_1 & \alpha_2 & \cdots & \alpha_n \end{bmatrix}$:
\[\begin{aligned} A & = \begin{bmatrix} \widetilde{q_1} & \widetilde{q_2} & \cdots & \widetilde{q_n} \end{bmatrix} \begin{bmatrix} 1 & -\frac{\alpha_2^T\widetilde{q_1}}{\widetilde{q}_1^T\widetilde{q_1}} & \cdots & -\frac{\alpha_n^T\widetilde{q_1}}{\widetilde{q}_1^T\widetilde{q_1}} \\ 0 & 1 & \cdots & -\frac{\alpha_n^T\widetilde{q_2}}{\widetilde{q}_2^T\widetilde{q_2}} \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & 1 \end{bmatrix} \\ & = \widetilde{Q} \widetilde{R} \\ & = Q \cdot diag(\|\widetilde{q_1}\|,\|\widetilde{q_2}\|,\cdots,\|\widetilde{q_n}\|) \widetilde{R} \\ & = QR \end{aligned}\]仍能保证$R$是一个上三角阵,且对角元为$|\widetilde{q_1}|,|\widetilde{q_2}|,\cdots,|\widetilde{q_n}|$。
注:
$Q$是一个正交矩阵,即$Q^TQ=I$
$R$是一个对角元为正的上三角阵
$A$是满秩的方阵
这样的分解是唯一的
事实上QR分解对非方阵$(m\times n,m \geq n)$也成立。

$m\times n$矩阵的QR分解
对于$m\times n$的矩阵$A$:
-
(简化QR分解)存在一个$m\times n$的列正交矩阵$Q_1$,和有非负对角元的$n\times n$的上三角矩阵$R_1$,使得$A=Q_1R_1$
-
(QR分解)存在一个$m\times m$的正交矩阵$Q$,和$m\times n$的矩阵$R$,使得$A=QR$。其中 $Q = \begin{bmatrix} Q_1 & Q_2 \end{bmatrix}$ , $R = \begin{bmatrix} R_1 &0 \end{bmatrix}^T$ 。其中$Q$由$Q_1$的列向量扩充得到。
对于列满秩的矩阵$A$,第一条本身就是 Gram–Schmidt 正交化的结果,$Q_1$的列向量就是被正交归一化的$A$的列向量。
在此基础上,只用扩充$Q$的列向量,就可以得到第二条。
对$A$更新(补充)列的方法来证明第一条成立:
(奠基略去)如果结论对$m\times (n-1)$,考虑$A=\begin{bmatrix} A_0 & \alpha_n \end{bmatrix}$,其中$A_0=Q_1R_1$。
1.如果$a_n \in \mathcal{R}(Q_0)$,就可以找到一个$\mathbf{r}_n$,使得$\alpha_n=Q_0\mathbf{r}_n$,任取一个新的与$Q_0$列向量都正交的向量$\mathbf{q}_n$:
\[\begin{aligned} A & = \begin{bmatrix} A_0 & \alpha_n \end{bmatrix} \\ & = \begin{bmatrix} Q_0 R_0 & Q_0 \mathbf{r}_n \end{bmatrix} \\ & = \begin{bmatrix} Q_0 & q_n \end{bmatrix} \begin{bmatrix} R_0 & \mathbf{r}_n \\ \mathbf{0}^T & 0 \end{bmatrix} \\ & = Q_1 R_1 \end{aligned}\]对$A$更新(补充)列的方法来证明第一条成立:
2.如果$a_n \notin \mathcal{R}(Q_0)$,我们直接做Gram-Schmidt正交化即可。
同之前地,$\widetilde{q}_n=\alpha_n - Q_0 \mathbf{r}_n$,$q_n=\frac{\widetilde{q}_n}{|\widetilde{q}_n|}$。
\[\begin{aligned} A & = \begin{bmatrix} A_0 & \alpha_n \end{bmatrix} \\ & = \begin{bmatrix} Q_0 R_0 & Q_0 \mathbf{r}_n + \|\widetilde{q}_n\| q_n \end{bmatrix} \\ & = \begin{bmatrix} Q_0 & q_n \end{bmatrix} \begin{bmatrix} R_0 & \mathbf{r}_n \\ \mathbf{0}^T & \|\widetilde{q}_n\| \end{bmatrix} \\ & = Q_1 R_1 \end{aligned}\]这样就可以证明对于$m\times n$矩阵(不要求列满秩,若只使用GS正交化就只能为列满秩的矩阵)的QR分解。
复杂度及稳定性
复杂度、稳定性 下面计算这种方法的复杂度:
-
计算$\widetilde{q_i}$做$i-1$次内积,和$1$次做差的正交化(顺便算出$\mathbf{r}_i$):$(i-1)(2m-1)+2(i-1)m$ flops
-
计算$\widetilde{q_i}$的模长$|\widetilde{q_i}|$以及$q_i$:$3m$ flops
总的复杂度(约)为$2mn^2$ flops。
由于浮点数存储的舍入误差,在一定范围(误差积累)后,随着$n$增大,$Q$矩阵逐渐失去正交性,稳定性较低。
MGS算法
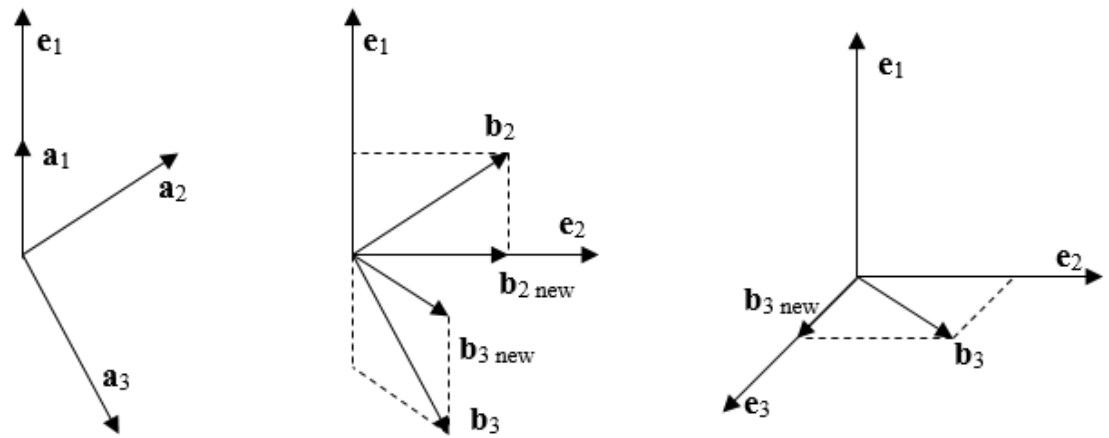
Modified Gram–Schmidt Orthogonalization 算法 MGS
相当于对CGS改变了次序:
-
首先选定一个向量作为第一个基准,然后将其余所有向量都投影到该基准的正交空间中。在该正交空间中,对剩下的向量重复前面的工作,那么最后所有的向量都是相互正交的了。
-
每次迭代步骤除了计算出一个正交向量积外,还通过计算使得其他未计算好的基向量都与算好的基向量正交。
CGS每次计算$R$的一个列,MGS每次计算$R$的一行。
CGS不断增添$Q$的列,MGS不断把$A$调整为$Q$。
复杂度 CGM与MGS的过程是等价的,它们的复杂度相同,为$2mn^2$ flops。
稳定性 MGS的稳定性要比CGS高,它计算量越往后是逐步减少的,因此前面计算积累的误差的影响就不会剧烈地扩散开,所以MGS可以使求得的矩阵Q的正交性更好。
Householder与Givens变换
正交变换
正交矩阵
- 正交矩阵$Q$是一个方阵,满足$Q^TQ=I$。
正交变换
-
正交变换是一个线性变换,它保持向量的长度和向量之间的夹角。
\[\begin{aligned} \mathbf{y}=Q\mathbf{x},\|\mathbf{y}\|=\|\mathbf{x}\|,\mathbf{y}^T\mathbf{x}=\mathbf{x}^T\mathbf{y} \end{aligned}\] -
正交变换可以用正交矩阵表示。
二维的正交变换只有两种:旋转和反射。由此给出Householder变换和Givens变换。
Householder变换
Householder矩阵 $H_{\mathbf{u}}$是$\mathbb{R}^n$上的反射变换,反射面为$\mathbf{u}$的正交补空间:
\[\begin{aligned} H_{\mathbf{u}} & = I - 2\mathbf{u}\mathbf{u}^T \end{aligned}\]其中$\mathbf{u}$是一个单位向量,$H$是一个正交、对称矩阵。
注意到对任意的$\mathbf{v}$,有:
\[\begin{aligned} \mathbf{v} & = (I-\mathbf{u}\mathbf{u}^T)\mathbf{v} + \mathbf{u}\mathbf{u}^T\mathbf{v} \\ H_{\mathbf{u}}\mathbf{v} & = (I-\mathbf{u}\mathbf{u}^T)\mathbf{v} - \mathbf{u}\mathbf{u}^T\mathbf{v} \end{aligned}\]其中$(I-\mathbf{u}\mathbf{u}^T)\mathbf{v}$是$\mathbf{v}$在$\mathbf{u}$的正交补空间上的投影,$\mathbf{u}\mathbf{u}^T\mathbf{v}$是$\mathbf{v}$在$\mathbf{u}$上的投影。即$H_{\mathbf{u}}$把$\mathbf{v}$映射到$\mathbf{v}$在$\mathbf{u}$的正交补空间上的投影的负向量。
Householder变换
-
Householder变换可以用Householder矩阵表示。
-
$\det{H}=-1$:因为正交相似于$H_{\boldsymbol{e_1}}=daig(-1,1,1,\dots,1)$。
-
Householder变换可以使任何非零向量$\boldsymbol{\xi}$变成与给定单位向量$\boldsymbol{\zeta}$同方向的向量$\boldsymbol{\eta}$。
Givens变换
Givens矩阵 $G_{\theta;i,j}$是$\mathbb{R}^n$上的旋转变换,旋转面为$\mathbf{e}_i$和$\mathbf{e}_j$张成的平面:
\[\begin{aligned} G_{\theta;i,j} =\begin{bmatrix} \ddots & & \phantom{\cos \theta} & \phantom{1} & \phantom{1} & \phantom{1} & \phantom{-\sin \theta} & \phantom{1} & \phantom{1} \\ & 1 & \phantom{1} & \phantom{1} & \phantom{1} & \phantom{1} & \phantom{-\sin \theta} & \phantom{1} & \phantom{1} \\ \phantom{1} & & \cos \theta & \phantom{1} & \cdots & \phantom{1} & -\sin \theta & \phantom{1} & \phantom{1} \\ \phantom{1} & & \phantom{\cos \theta} & 1 & \phantom{1} & \phantom{1} & \phantom{-\sin \theta} & \phantom{1} & \phantom{1} \\ \phantom{1} & & \vdots & \phantom{1} & \ddots & \phantom{1} & \vdots & \phantom{1} & \phantom{1} \\ \phantom{1} & & \phantom{\cos \theta} & \phantom{1} & \phantom{1} & 1 & \phantom{-\sin \theta} & \phantom{1} & \phantom{1} \\ \phantom{1} & & \sin \theta & \phantom{1} & \cdots & \phantom{1} & \cos \theta & \phantom{1} & \phantom{1} \\ \phantom{1} & & \phantom{\cos \theta} & \phantom{1} & \phantom{1} & \phantom{1} & \phantom{-\sin \theta} & 1 & \phantom{1} \\ \phantom{1} & & \phantom{\cos \theta} & \phantom{1} & \phantom{1} & \phantom{1} & \phantom{-\sin \theta} & \phantom{1} & \ddots \\ \end{bmatrix} \end{aligned}\]Givens变换
-
Givens变换可以用Givens矩阵表示。
-
$\det{G}=1$。
-
用上面矩阵的$G_{\theta;i,j}$给出的Givens变换只改变任何非零向量$\boldsymbol{\xi}$的两个分量。
-
Givens矩阵(变换)是两个Householder矩阵(变换)的乘积(Householder矩阵比Givens矩阵更基本)。
QR分解——Householder变换
利用Householer变换,我们也可以像上面一样通过地推(归纳)的方法来进行QR分解。对于$m\times n$的矩阵$A$:
1.$\alpha_1 \neq \mathbf{0}$:
我们可以构造一个Householder矩阵$Q_1$,使得$Q_1\alpha_n=|\alpha_n|\mathbf{e}_1$。从而$Q_1A$可以写成:
\[\begin{aligned} Q_1A & = \begin{bmatrix} \|\alpha_n\| & \mathbf{b}^T \\ \mathbf{0} & A_1 \end{bmatrix} = \widetilde{A}_1 \end{aligned}\]而$A_1=Q_2\begin{bmatrix} R_2 \ O \end{bmatrix}$,从而:
\[\begin{aligned} \begin{bmatrix} 1 & \\ & Q_2^T \end{bmatrix} Q_1A & = \begin{bmatrix} \|\alpha_1\| & \mathbf{b}^T \\ \mathbf{0} & R_2 \\ \mathbf{0} & O \end{bmatrix} \end{aligned}\] \[\begin{aligned} Q^TA & =R \\ A & =QR \end{aligned}\]2.$\alpha_1 = \alpha_2 = … = \alpha_j-i = \mathbf{0}$但$\alpha_j \neq \mathbf{0}$:
有$\begin{bmatrix} \alpha_j & \alpha_{j+1} & \cdots & \alpha_n \end{bmatrix}=QR_j$
从而$A=Q\begin{bmatrix} O & QR_j \end{bmatrix} = Q\begin{bmatrix} O & R_j \end{bmatrix} =QR$。
\[\begin{aligned} Q_{n-1}...Q_2Q_1A=\widetilde{A}_n \end{aligned}\]注
这个证明也说明$n$阶正交阵可以表示成不多于$n$个Householder矩阵的乘积。
在实际计算中,我们是对上式中的$A_1$继续进行Householder变换,使其第一列只有第一个分量。最后结果形如:
Householder变换的复杂度与稳定性
复杂度 Householder变换QR分解的复杂度约$2mn^2-2n^3/3$ flops。
稳定性
-
Householder算法有更好的数值计算性能,能减少计算机浮点数存储的误差,大大提高稳定性。
-
无法并行,一次性需要的内存较多。
QR分解——Givens变换
仿照用Householder变换进行QR分解的方法,利用Givens变换也可以对$m\times n$矩阵$A$QR分解。
-
用$m-1$次Givens变换可以把$A$的第1列的最后$m-1$个元素变成0:每次用该列主对角线元素与其下面的元素构成Givens变换。
-
用$m-2$次Givens变换可以把$A$的第2列的最后$m-2$个元素变成零。
-
…
-
设已经把$X$的前$j-1$列变成了上三角形(前$j-1$列主对角线下方的元素都变成了零。在第$j$步,用$m-j$次Givens变换把主对角线下方的元素都变成零。
注
每次变换仅影响到第$j$行和第$k$行($k>j$),所以不会影响到所有列的前$j-1$行元素。
第$j$步关于第$j$和第$k$元素作Givens变换时,仅需对当前$A$的第$j, k$两行和第$j, j+1, \dots, m$列组成的两行的子矩阵作二维的Givens变换即可, 并且对第$j$列的两个元素的变换结果分别为$\sqrt{x_j^2 + x_k^2}$和$0$,不用重复计算。
如此进行$m$步后就把$A$变成了上三角形,共需要进行$mn - \frac12 n(n+1)$次Givens变换。
总结与比较
| 方法 | 复杂度 | 原理 | 稳定性 |
|---|---|---|---|
| CGS | $2mn^2$ | 基于正交化定义 | 低 |
| MGS | $2mn^2$ | 修正正交化过程 | 中 |
| Householder | $2mn^2-2n^3/3$ | 基于正交变换 | 高 |
| Givens | $2mn^2(?)$ | 基于正交变换 | 略低于Householder |
| 方法 | 优点 | 缺陷 |
|---|---|---|
| Gram-Schmidt | 1.适合小矩阵计算; 2.可以随时停止计算 |
1.不适合稀疏矩阵; 2.积累大量舍入误差; 3.必须保存整个矩阵,内存开销大 |
| Householder | 1.不显式计算Q; 2.最适合稠密矩阵 |
1.无法中断; 2.对于稀疏矩阵会产生大量无效计算 |
| Givens | 1.最适合稀疏矩阵; 2.不会对零元素做无效操作 |
1.无法中断; 2.不适合稠密矩阵计算,占空间大 |
参考
-
Bjõrck, Å. (1996). Numerical Methods for Least Squares Problems.
-
梁鑫,田垠,杨一龙. 线性代数入门.
-
Wikipedia.
-
https://www.math.pku.edu.cn/teachers/lidf/docs/statcomp/html/_statcompbook/matrix-qr.html
-
https://blog.csdn.net/weixin_51426083/article/details/128153458
Comments